
Page 479 - The Mechatronics Handbook
P. 479
0066_frame_C19 Page 101 Wednesday, January 9, 2002 5:32 PM
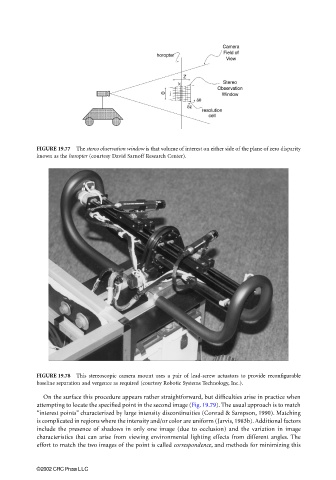
FIGURE 19.77 The stereo observation window is that volume of interest on either side of the plane of zero disparity
known as the horopter (courtesy David Sarnoff Research Center).
FIGURE 19.78 This stereoscopic camera mount uses a pair of lead-screw actuators to provide reconfigurable
baseline separation and vergence as required (courtesy Robotic Systems Technology, Inc.).
On the surface this procedure appears rather straightforward, but difficulties arise in practice when
attempting to locate the specified point in the second image (Fig. 19.79). The usual approach is to match
“interest points” characterized by large intensity discontinuities (Conrad & Sampson, 1990). Matching
is complicated in regions where the intensity and/or color are uniform (Jarvis, 1983b). Additional factors
include the presence of shadows in only one image (due to occlusion) and the variation in image
characteristics that can arise from viewing environmental lighting effects from different angles. The
effort to match the two images of the point is called correspondence, and methods for minimizing this
©2002 CRC Press LLC