
Page 481 - The Mechatronics Handbook
P. 481
0066_frame_C19 Page 103 Wednesday, January 9, 2002 5:32 PM
FIGURE 19.81 The foveal stereo representation provides high acuity near the center of the observation window,
with decreasing resolution towards the periphery (Courtesy David Sarnoff Research Center).
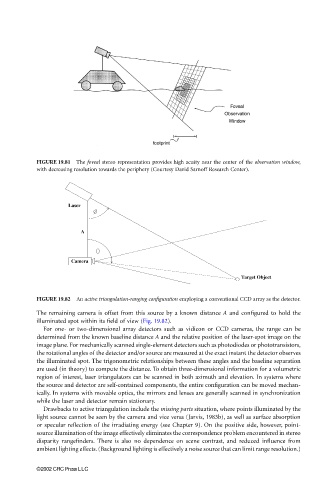
Laser
A
Camera
Target Object
FIGURE 19.82 An active triangulation-ranging configuration employing a conventional CCD array as the detector.
The remaining camera is offset from this source by a known distance A and configured to hold the
illuminated spot within its field of view (Fig. 19.82).
For one- or two-dimensional array detectors such as vidicon or CCD cameras, the range can be
determined from the known baseline distance A and the relative position of the laser-spot image on the
image plane. For mechanically scanned single-element detectors such as photodiodes or phototransistors,
the rotational angles of the detector and/or source are measured at the exact instant the detector observes
the illuminated spot. The trigonometric relationships between these angles and the baseline separation
are used (in theory) to compute the distance. To obtain three-dimensional information for a volumetric
region of interest, laser triangulators can be scanned in both azimuth and elevation. In systems where
the source and detector are self-contained components, the entire configuration can be moved mechan-
ically. In systems with movable optics, the mirrors and lenses are generally scanned in synchronization
while the laser and detector remain stationary.
Drawbacks to active triangulation include the missing parts situation, where points illuminated by the
light source cannot be seen by the camera and vice versa (Jarvis, 1983b), as well as surface absorption
or specular reflection of the irradiating energy (see Chapter 9). On the positive side, however, point-
source illumination of the image effectively eliminates the correspondence problem encountered in stereo
disparity rangefinders. There is also no dependence on scene contrast, and reduced influence from
ambient lighting effects. (Background lighting is effectively a noise source that can limit range resolution.)
©2002 CRC Press LLC