
Page 485 - The Mechatronics Handbook
P. 485
0066_frame_C19 Page 107 Wednesday, January 9, 2002 5:32 PM
X
Y D/A MUX
Z
TRANSMITTER CURRENT
AXES SOURCES
CPU
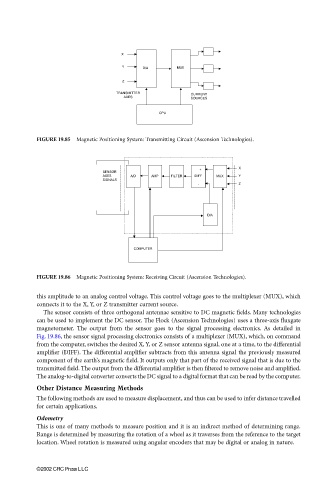
FIGURE 19.85 Magnetic Positioning System: Transmitting Circuit (Ascension Technologies).
+ X
SENSOR
AXES A/D AMP FILTER DIFF MUX Y
SIGNALS
- Z
D/A
COMPUTER
FIGURE 19.86 Magnetic Positioning System: Receiving Circuit (Ascension Technologies).
this amplitude to an analog control voltage. This control voltage goes to the multiplexer (MUX), which
connects it to the X, Y, or Z transmitter current source.
The sensor consists of three orthogonal antennae sensitive to DC magnetic fields. Many technologies
can be used to implement the DC sensor. The Flock (Ascension Technologies) uses a three-axis fluxgate
magnetometer. The output from the sensor goes to the signal processing electronics. As detailed in
Fig. 19.86, the sensor signal processing electronics consists of a multiplexer (MUX), which, on command
from the computer, switches the desired X, Y, or Z sensor antenna signal, one at a time, to the differential
amplifier (DIFF). The differential amplifier subtracts from this antenna signal the previously measured
component of the earth’s magnetic field. It outputs only that part of the received signal that is due to the
transmitted field. The output from the differential amplifier is then filtered to remove noise and amplified.
The analog-to-digital converter converts the DC signal to a digital format that can be read by the computer.
Other Distance Measuring Methods
The following methods are used to measure displacement, and thus can be used to infer distance travelled
for certain applications.
Odometry
This is one of many methods to measure position and it is an indirect method of determining range.
Range is determined by measuring the rotation of a wheel as it traverses from the reference to the target
location. Wheel rotation is measured using angular encoders that may be digital or analog in nature.
©2002 CRC Press LLC