
Page 115 - Dynamic Vision for Perception and Control of Motion
P. 115
3.4 Behavioral Capabilities for Locomotion 99
O
O
·
§· § 0 0 0 0 0 § · 1 § ·
¨¸ ¨ VaT ) 1/T 0 0 0 ¸ ¨ ¸ ¨ ¸
\
\
0
/(
¨¸ ¨ \ \ ¸ ¨ ¸ ¨ ¸
d
¸
E
¨¸ E ¨ 1/(2T E ) 1 1/T E 0 0 ¨ ¸ ¨ ¸
0 u
dt ¨¸ ¨ ¸ ¨ ¸ ¨ ¸ (3.38)
\
\
0
¨¸ ¨ 0 1 0 0 0 ¸ ¨ ¸ ¨ ¸
¨¸ ¨ ¸ ¨ ¸ ¨ ¸
y
0
y
©¹ © 0 0 V V 0 ¹ © ¹ © ¹
)
t
dx La dt x b dȜ d.
La
For the test vehicle VaMP, a 240 kW (325 HP) powered sedan Mercedes 500
SEL, the parameters involved are (average representative values) m = 2650kg (that
is, m WL = m/2 = 1325 kg for the bicycle model), k T = 96 kN/rad, I z = 5550 kg m²;
and a = 3.14 m. This leads to i zB² = 0.85 and k ltf § 72 (m/s² per rad) = 1.25 (m/s² per
degree wheel angle of attack), and finally to the following speed-dependent time
constants for lateral motion (V in m/s):
s
T \ V /84.7 0.01389 V ( ) ,
(3.39)
s
T E V /72 0.0118 V ( ).
These values as a func-
tion of speed V already
C 0h
V have been shown in Figure
°
°
u = Ȝ V ȥ abs - ȥ rel ȥ rel y ° y 3.11 for the test vehicle
V
° Ȝ - a T ȥ VaMP (top right). They in-
crease up to values of 0.9
a
V seconds at maximum
- °
ȕ ȕ speed. The block diagram
k ltf / (2V) corresponding to Equation
-
3.38 is shown in Figure
1/T ȕ = k ltf / V
3.24.
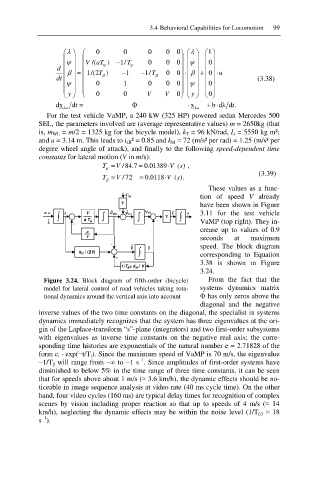
Figure 3.24. Block diagram of fifth-order (bicycle) From the fact that the
model for lateral control of road vehicles taking rota- systems dynamics matrix
tional dynamics around the vertical axis into account ĭ has only zeros above the
diagonal and the negative
inverse values of the two time constants on the diagonal, the specialist in systems
dynamics immediately recognizes that the system has three eigenvalues at the ori-
gin of the Laplace-transform “s”-plane (integrators) and two first-order subsystems
with eigenvalues as inverse time constants on the negative real axis; the corre-
sponding time histories are exponentials of the natural number e = 2.71828 of the
form c i · exp(ít/T i). Since the maximum speed of VaMP is 70 m/s, the eigenvalue
í1
í1/T ȕ will range from í to í1 s . Since amplitudes of first-order systems have
diminished to below 5% in the time range of three time constants, it can be seen
that for speeds above about 1 m/s (§ 3.6 km/h), the dynamic effects should be no-
ticeable in image sequence analysis at video rate (40 ms cycle time). On the other
hand, four video cycles (160 ms) are typical delay times for recognition of complex
scenes by vision including proper reaction so that up to speeds of 4 m/s (§ 14
km/h), neglecting the dynamic effects may be within the noise level (1/T ȕ3 § 18
í1
s ).