
Page 109 - Instrumentation Reference Book 3E
P. 109
94 Vibration
These three important parameters are features
of the spring-mass-damper system and are inde-
pendent of the input driving function.
Such systems have been extensively analyzed
when excited by the commonly met input forcing
functions (step, impulse. ramp, sinusoid). A more
general theory for handling any input function
other than these is also available. In practice
the step, impulse, and continuous sinusoidal
responses are used in analyzes, as they are reason-
ably easy to apply in theory and in practical use.
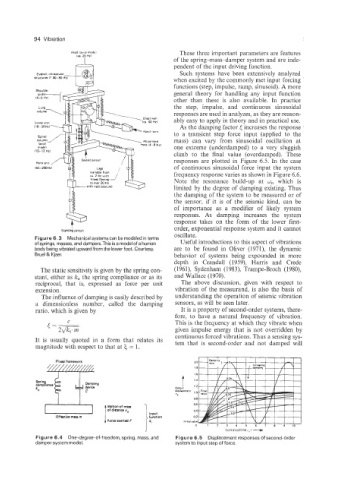
As the damping factor ( increases the response
to a transient step force input (applied to the
mass) can vary from sinusoidal oscillation at
one extreme (underdamped) to a very sluggish
climb to the final value (overdamped). These
responses are plotted in Figure 6.5. In the case
of continuous sinusoidal force input the system
frequency response varies as shown in Figure 6.6.
Note the resonance build-up at w, which is
limited by the degree of damping existing. Thus
the damping of the system to be measured or of
the sensor, if it is of the seismic kind, can be
of importance as a modifier of likely system
responses. As damping increases the system
response takes on the form of the lower first-
order, exponential response system and it cannot
Standing perion
Figure 6.3 Mechanical systemscan bemodeled in terms oscillate.
of springs, masses, and dampers.This is a model of a human UsefLil introductions to this aspect of vibrations
body being vibrated upward from the lower foot. Courtesy, are to be found in Oliver (1971), the dynamic
Bruel & Kjaer. behavior of systems being expounded in more
depth in Crandall (1959), Harris and Crede
The static sensitivity is given by the spring con- (1961), Sydenham (1983), Trampe-Broch (1980),
stant, either as k, the spring compliance or as its and Wallace (1970).
reciprocal, that is, expressed as force per unit The above discussion, given with respect to
extension. vibration of the measurand, is also the basis of
The influence of damping is easily described by understanding the operation of seismic vibration
a dimensionless number, called the damping sensors, as will be seen later.
ratio, which is given by It is a property of second-order systems, there-
fore, to have a natural frequency of vibration.
This is the frequency at which they vibrate when
given impulse energy that is not overridden by
continuous forced vibrations. Thus a sensing sys-
It is usually quoted in a form that relates its tem that is second-order and not damped will
magnitude with respect to that at 5 = 1.
Fixed framework 2.0
la
16
Sprin 1.4
compBimce Damping 12
ks device
10
0.8
0.6
04
02
YAY*
0 1 2 3 4 5 6 7 a 9 t o
Normalized time-," 1 --r
Figure 6.4 One-degree-of-freedom, spring, mass, and Figure 6.5 Displacement responses of second-order
damper system model. system to input step of force.