
Page 177 - Modern Control Systems
P. 177
Problems 151
[22]. The extender is defined as an active manipulator P2.47 The water level h{t) in a tank is controlled by an
worn by a human to augment the human's strength. The open-loop system, as shown in Figure P2.47. A DC
human provides an input U(s), as shown in Figure motor controlled by an armature current ;'„ turns a
P2.45. The endpoint of the extender is P(s). Determine shaft, opening a valve. The inductance of the DC
the output P(s) for both U(s) and F(s) in the form motor is negligible, that is, L a = 0. Also, the rota-
tional friction of the motor shaft and valve is negli-
P(s) = T^Uis) + T 2(s)F(s).
gible, that is, b = 0. The height of the water in the
tank is
r
w h(t) J [1.60(f) ~ h(t)]dt.
•v.
Human ' • B . Performance ,, the motor constant is K,„ = 10, and the inertia of the
3
2
filter f motor shaft and valve is J - 6 X KT kgm . Deter-
H(s) G(s)
| B(s) mine (a) the differential equation for h(t) and v(t) and
, ,+ L
i (b) the transfer function H(s)IV(s).
Pis) P2.48 The circuit shown in Figure P2.48 is called a lead-
r >r GiW *— K(s) *-n lag filter.
K.
i
1 -V stability t V + (a) Find the transfer function V 2(s)/\{(s). Assume an
•
controller ideal op-amp.
£(*) G c{s)
(b) Determine V 2(s)/V^s) when l?j = 100Hl,
Load I j i R 2 = 200 k£l, Q = 1 /JLF, and C 2 = 0.1 fiF.
J (c) Determine the partial fraction expansion for
J
P2.49 A closed-loop control system is shown in Figure
P2.49.
FIGURE P2.45 Model of extender.
(a) Determine the transfer function
T{s) = Y(s)/R(s).
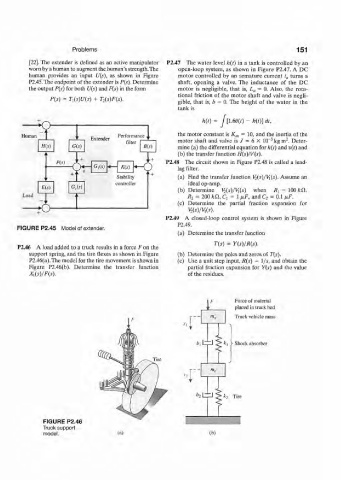
P2.46 A load added to a truck results in a force F on the
support spring, and the tire flexes as shown in Figure (b) Determine the poles and zeros of T(s).
P2.46(a).The model for the tire movement is shown in (c) Use a unit step input, .SKY) = 1/s, and obtain the
Figure P2.46(b). Determine the transfer function partial fraction expansion for Y(s) and the value
X,(s)/F(s). of the residues.
Force of material
placed in truck bed
Truck vehicle mass
*i r Shock absorber
FIGURE P2.46
Truck support
model. la) (h)