
Page 571 - Dynamics of Mechanical Systems
P. 571
0593_C16_fm Page 552 Tuesday, May 7, 2002 7:06 AM
552 Dynamics of Mechanical Systems
Follower Follower
Rise Rise
h(θ)
h(θ)
Dwell
h
O
Dwell
Cam Rotation θ Cam Rotation θ
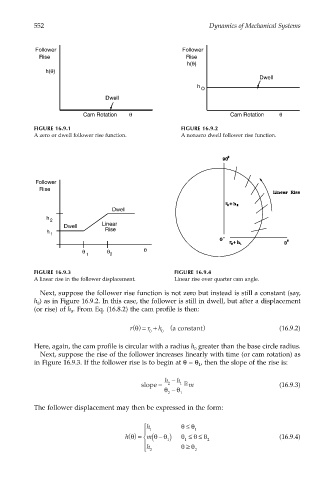
FIGURE 16.9.1 FIGURE 16.9.2
A zero or dwell follower rise function. A nonzero dwell follower rise function.
Follower
Rise
Dwell
h 2
Dwell Linear
h Rise
1
θ θ θ
1 2
FIGURE 16.9.3 FIGURE 16.9.4
A linear rise in the follower displacement. Linear rise over quarter cam angle.
Next, suppose the follower rise function is not zero but instead is still a constant (say,
h ) as in Figure 16.9.2. In this case, the follower is still in dwell, but after a displacement
0
(or rise) of h . From Eq. (16.8.2) the cam profile is then:
0
r θ () = r + h (a constant ) (16.9.2)
0 0
Here, again, the cam profile is circular with a radius h greater than the base circle radius.
0
Next, suppose the rise of the follower increases linearly with time (or cam rotation) as
in Figure 16.9.3. If the follower rise is to begin at θ = θ , then the slope of the rise is:
1
h − h
D
slope = 2 1 = m (16.9.3)
θ − θ
2 1
The follower displacement may then be expressed in the form:
≤
h 1 θθ 1
(
θ θ
−
h θ () = m θθ ) θ ≤≤ 2 (16.9.4)
1
1
θθ
≥
h
2 2