
Page 476 - Engineering Digital Design
P. 476
446 CHAPTER 10/INTRODUCTION TO SYNCHRONOUS STATE MACHINE DESIGN
State Memory
variable input logic
State varibales AB change values
Q t -> Q t+1 S R
0^ 0 0 (f>
0 -> 1 1 0
1 -> 0 0 1
PIT
(a) (b)
Resolver FSM to be designed Characterization of the memory
DCK
CK
/
7R,
/S A
u
0 1 0 1
DCK ^(D+CKL CK A^ 0 0 0 ^
0 0
</> / 1 (T~ Tl / 1 n w
TS X S
&
B /R 0
(c) (d)
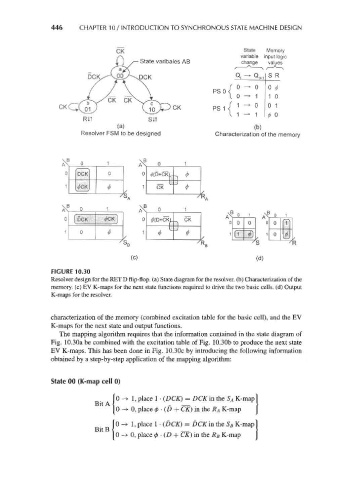
FIGURE 10.30
Resolver design for the RET D flip-flop, (a) State diagram for the resolver. (b) Characterization of the
memory, (c) EV K-maps for the next state functions required to drive the two basic cells, (d) Output
K-maps for the resolver.
characterization of the memory (combined excitation table for the basic cell), and the EV
K-maps for the next state and output functions.
The mapping algorithm requires that the information contained in the state diagram of
Fig. 10.30a be combined with the excitation table of Fig. 10.30b to produce the next state
EV K-maps. This has been done in Fig. 10.30c by introducing the following information
obtained by a step-by-step application of the mapping algorithm:
State 00 (K-map cell 0)
[
0 -> 1, place 1 • (DCK) = DCK in the 5 A K-map 1
Bit A { - }
'0^0, place 0 • (D + CK) in the R A K-map ]
> 1, place 1 • (DCK) = DCK in the S B K-map 1
> 0, place 0 • (D + CK) in the R B K-map I