
Page 600 - Engineering Digital Design
P. 600
570 CHAPTER 12 / MODULE AND BIT-SLICE DEVICES
CL LD PRE CLR
1 X X 0 1 xLD-P, \LD-Pj
CL\ 00 01 11 10 CL\ 00 01 11 10
/•M X
00 0 0 0
0 0 1 0 0 0 0 0 CD 0 0 0 0 0 p~
0 1 0 0 1 1 0 0 0 0 1 (1 1 1 1)
0 1 1 1 0
/ PRE / CLH
X = Irrelevant input
(a) (b)
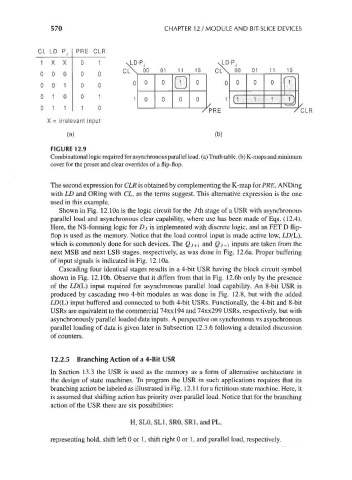
FIGURE 12.9
Combinational logic required for asynchronous parallel load, (a) Truth table, (b) K-maps and minimum
cover for the preset and clear overrides of a flip-flop.
The second expression for CLR is obtained by complementing the K-map for PRE, ANDing
with LD and ORing with CL, as the terms suggest. This alternative expression is the one
used in this example.
Shown in Fig. 12.10a is the logic circuit for the 7th stage of a USR with asynchronous
parallel load and asynchronous clear capability, where use has been made of Eqs. (12.4).
Here, the NS-forming logic for Dj is implemented with discrete logic, and an FET D flip-
flop is used as the memory. Notice that the load control input is made active low, LD(L),
which is commonly done for such devices. The Qj+\ and Qj-\ inputs are taken from the
next MSB and next LSB stages, respectively, as was done in Fig. 12.6a. Proper buffering
of input signals is indicated in Fig. 12.10a.
Cascading four identical stages results in a 4-bit USR having the block circuit symbol
shown in Fig. 12.1 Ob. Observe that it differs from that in Fig. 12.6b only by the presence
of the LD(L) input required for asynchronous parallel load capability. An 8-bit USR is
produced by cascading two 4-bit modules as was done in Fig. 12.8, but with the added
LD(L) input buffered and connected to both 4-bit USRs. Functionally, the 4-bit and 8-bit
USRs are equivalent to the commercial 74xxl94 and 74xx299 USRs, respectively, but with
asynchronously parallel loaded data inputs. A perspective on synchronous vs asynchronous
parallel loading of data is given later in Subsection 12.3.6 following a detailed discussion
of counters.
12.2.5 Branching Action of a 4-Bit USR
In Section 13.3 the USR is used as the memory as a form of alternative architecture in
the design of state machines. To program the USR in such applications requires that its
branching action be labeled as illustrated in Fig. 12.11 for a fictitious state machine. Here, it
is assumed that shifting action has priority over parallel load. Notice that for the branching
action of the USR there are six possibilities:
H, SLO, SL1, SRO, SRI, and PL,
representing hold, shift left 0 or 1, shift right 0 or 1, and parallel load, respectively.