
Page 187 - Microsensors, MEMS and Smart Devices - Gardner Varadhan and Awadelkarim
P. 187
PROCESSES USING BULK AND SURFACE MICROMACHINING 167
v^s^^s
(c) (d)
(e) (f)
Silicon Nitride Oxide Polymer
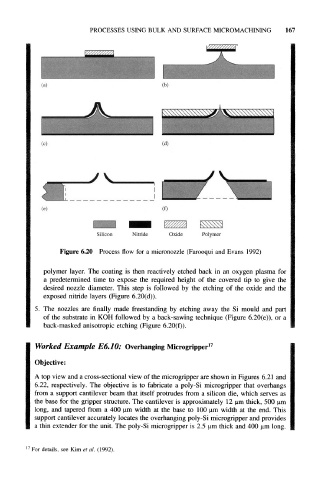
Figure 6.20 Process flow for a micronozzle (Farooqui and Evans 1992)
polymer layer. The coating is then reactively etched back in an oxygen plasma for
a predetermined time to expose the required height of the covered tip to give the
desired nozzle diameter. This step is followed by the etching of the oxide and the
exposed nitride layers (Figure 6.20(d)).
5. The nozzles are finally made freestanding by etching away the Si mould and part
of the substrate in KOH followed by a back-sawing technique (Figure 6.20(e)), or a
back-masked anisotropic etching (Figure 6.20(f)).
Worked Example E6.10: Overhanging Microgripper 17
Objective:
A top view and a cross-sectional view of the microgripper are shown in Figures 6.21 and
6.22, respectively. The objective is to fabricate a poly-Si microgripper that overhangs
from a support cantilever beam that itself protrudes from a silicon die, which serves as
the base for the gripper structure. The cantilever is approximately 12 um thick, 500 um
long, and tapered from a 400 um width at the base to 100 um width at the end. This
support cantilever accurately locates the overhanging poly-Si microgripper and provides
a thin extender for the unit. The poly-Si microgripper is 2.5 um thick and 400 um long.
For details, see Kim et al. (1992).