
Page 229 - Modern Control Systems
P. 229
Section 3.8 Design Examples 203
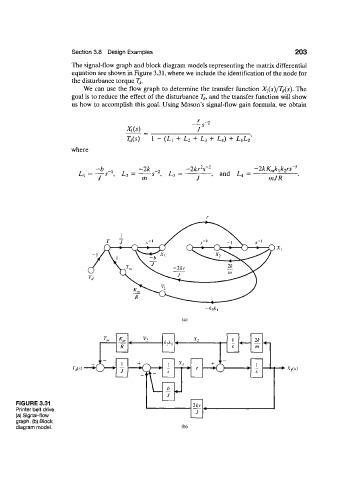
The signal-flow graph and block diagram models representing the matrix differential
equation are shown in Figure 3.31, where we include the identification of the node for
the disturbance torque T d.
We can use the flow graph to determine the transfer function X x(s)jT d(s). The
goal is to reduce the effect of the disturbance T d, and the transfer function will show
us how to accomplish this goal. Using Mason's signal-flow gain formula, we obtain
5
X x{s) = 7
T d(s) 1 - (Li + L 2 + L 3 + L 4) + LjL 2 '
where
2
-2kr s~ 2 -IkK^^rs' 3
- 2 * -2 , J r
= ^ s - \
L x L 2 and L 4 =
s , Li, -J—' ^JR *
m
k->ki
(a)
* 1 • Xi(.v)
FIGURE 3.31
Printer belt drive.
(a) Signal-flow
graph, (b) Block
diagram model. (b)