
Page 252 - Modern Control Systems
P. 252
226 Chapter 3 State Variable Models
of the mass of the drug in the gastrointestinal tract is
equal to the rate at which the drug is ingested minus
A W — r the rate at which the drug enters the bloodstream, a
R,
rate that is taken to be proportional to the mass pre-
"'© ©«* sent. The rate of change of the mass in the blood-
stream is proportional to the amount coming from the
gastrointestinal tract minus the rate at which mass is
lost by metabolism, which is proportional to the mass
FIGURE P3.30 Two-input RLC circuit. present in the blood. Develop a state space represen-
tation of this system.
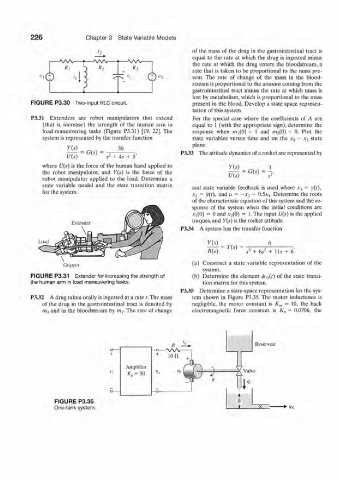
P3.31 Extenders are robot manipulators that extend For the special case where the coefficients of A are
(that is, increase) the strength of the human arm in equal to 1 (with the appropriate sign), determine the
load-maneuvering tasks (Figure P3.31) [19, 22], The response when mi(0) = 1 and m 2(0) = 0. Plot the
system is represented by the transfer function state variables versus time and on the x t — x 2 state
plane.
30
G(s) P3.33 The attitude dynamics of a rocket are represented by
s* + 4? + 3
where U(s) is the force of the human hand applied to Y(s) 1
the robot manipulator, and Y{s) is the force of the U(s) = G(s)
robot manipulator applied to the load. Determine a
state variable model and the state transition matrix and state variable feedback is used where x% = y(r),
for the system. x f an = x
i ~ y()> d " ~ 2 ~ 0.5;^. Determine the roots
of the characteristic equation of this system and the re-
sponse of the system when the initial conditions are
.^(0) = 0 and x 2(0) = 1. The input U{s) is the applied
Extender torques, and Y(s) is the rocket attitude.
P3.34 A system has the transfer function
Y(s)
T(s) =
R(s) s- 1 + 6s 2 + lis + 6
(a) Construct a state variable representation of the
G ripper
system.
FIGURE P3.31 Extender for increasing the strength of (b) Determine the element <£n(/) of the state transi-
the human arm in load maneuvering tasks. tion matrix for this system.
P3.35 Determine a state-space representation for the sys-
P3.32 A drug taken orally is ingested at a rate /-.The mass tem shown in Figure P3.35. The motor inductance is
of the drug in the gastrointestinal tract is denoted by negligible, the motor constant is K„, = 10, the back
/Hi and in the bloodstream by m 2. The rate of change electromagnetic force constant is K h = 0.0706, the
Reservoir
FIGURE P3.35
One-tank system. *• ¢0